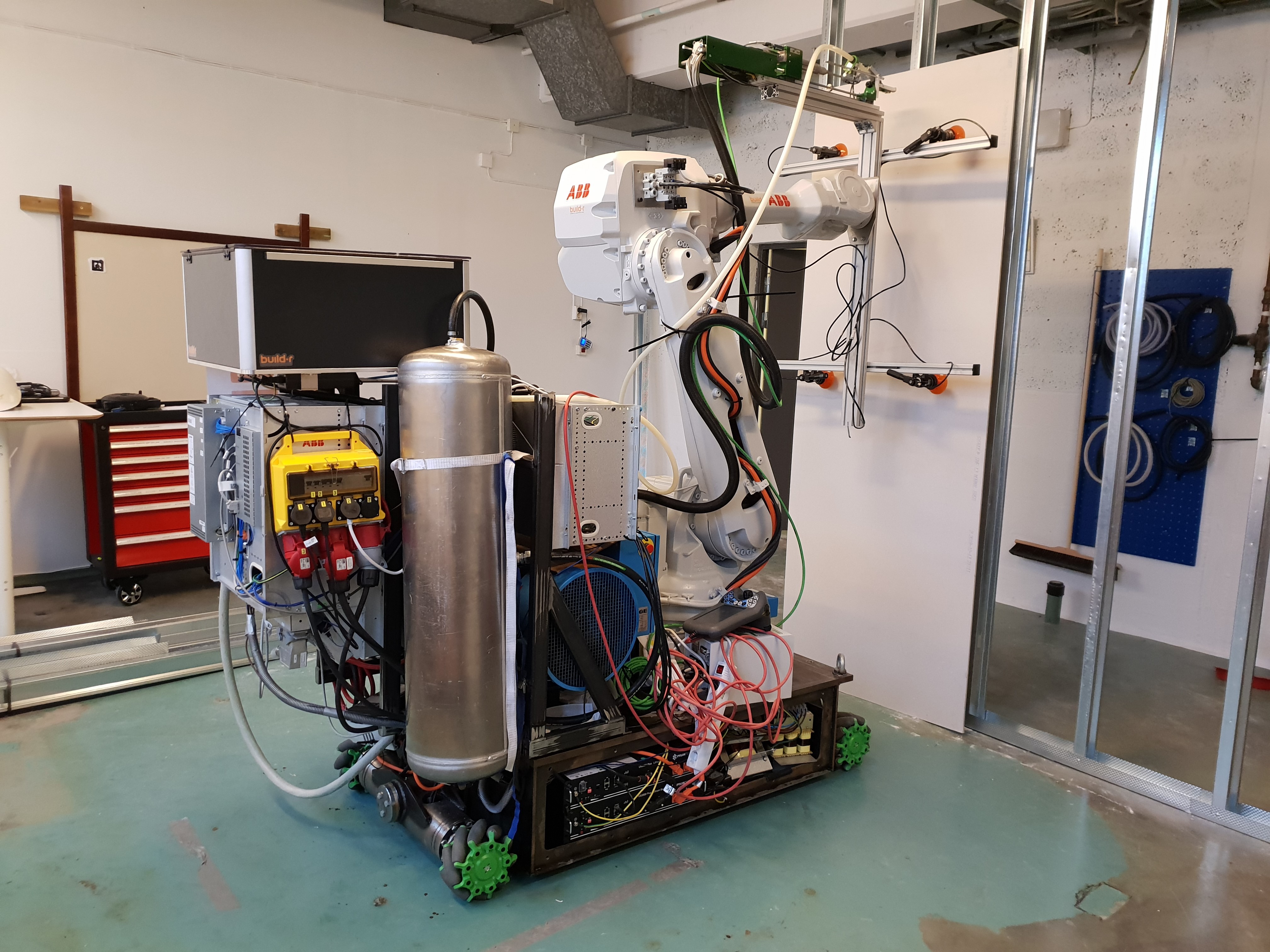



Complete battery-powered prototype of mobile robot for plaster installation (ABB Robot arm IRB4600 Not included in the item. The arm will be dismantled before handing out)
The system consists of a mobile platform that is controlled via CAN communication.
A sturdy steel chassis.
A battery system with 4 * 2.4 kwH lifepo batteries and associated inverter. Through inverter, both charging and withdrawal from batteries (3-phase) takes place.
An inverter 230-> 24 V for platform operation.
Grips with vacuum system
Automatically supplied screwdriver from Deprag, controlled via the profinet, currently set to 2-layer drywall screw. Complete system with vibration feeder
Compressor Boge CL7 for vacuum system and screw feed.
1 2D laser scanner Sick PLS
"Building box" power plant 400-> 230V
Computer Acer Aspire 5 with software for controlling the system

